Encoder inputs
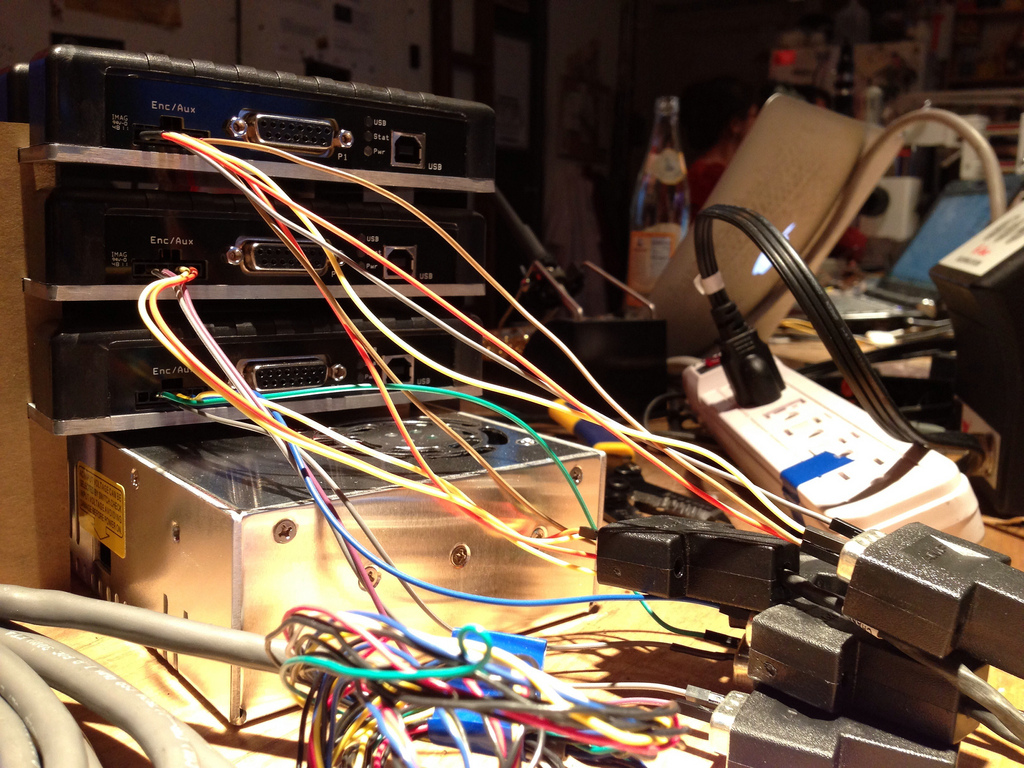
Six axes of encoder inputs from the PUMA 280 robot arm connected to the stack of three RobotEQ MDC2250C controllers. A proper wiring harness needs to be built with the Molex Microfit 3.0, model 43645 used on the controllers.
Six axes of encoder inputs from the PUMA 280 robot arm connected to the stack of three RobotEQ MDC2250C controllers. A proper wiring harness needs to be built with the Molex Microfit 3.0, model 43645 used on the controllers.