Robot arm controllers
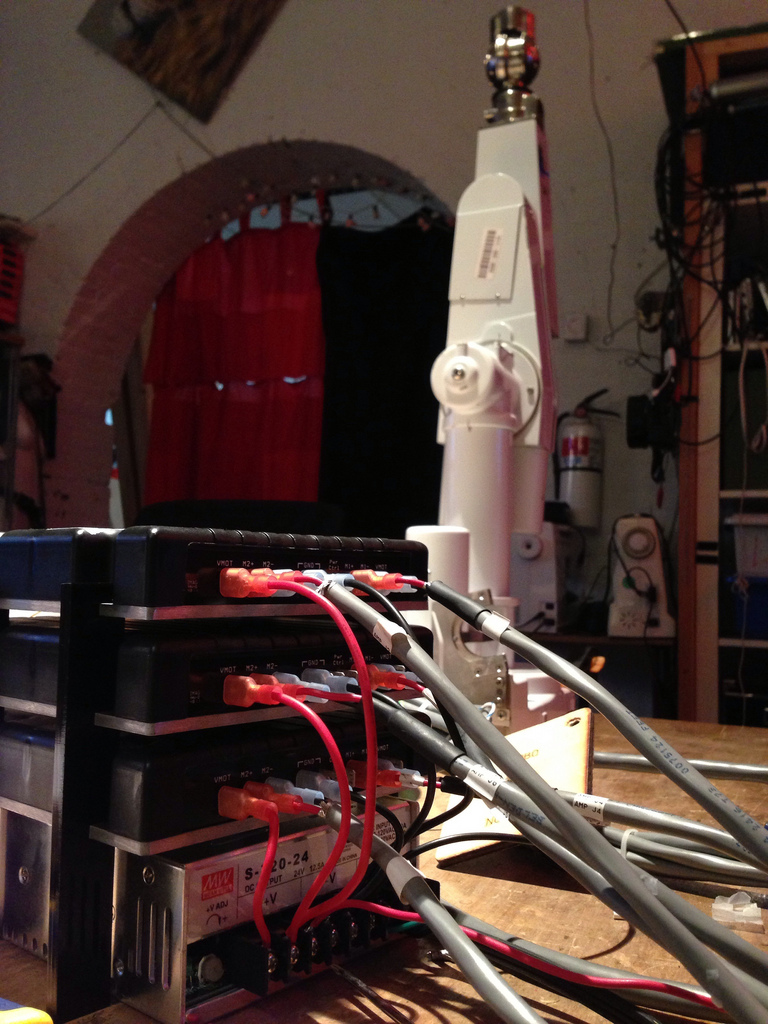
Stack of three RobotEQ MDC2250C controllers and a MW S-320-24 power supply to control a PUMA 280 arm. The arm is in its “home” position since there are no limit switches and the 2250 doesn’t seem to support the index pulse calibration.